表面肌電(SEMG)傳感器及其放置位置建議
本文內容來源于SENIAMproject (Surface ElectroMyoGraphy for the Non-Invasive Assessment of Muscles),介紹表面肌電(SEMG)傳感器及其放置位置建議。
SEMG 傳感器
1 電極形狀(ElectrodeShape)
“電極形狀”定義為SEMG電極的導電區域的形狀。在文獻中,據報道矩形(正方形)和圓形(橢圓形)電極都用于SEMG記錄。當僅考慮形狀差異時(即,將直徑為R的圓形電極與方形電極尺寸為R x R進行比較),在性能和拾取面積上不會有太大差異。兩個電極的視圖將基本相同。只要兩個電極的總表面積相同(對于較小的R值就是如此),兩個電極的皮膚阻抗將幾乎相等,因此從這個意義上講,也不會產生影響。歐洲學者研究顯示直徑為10 mm的圓形電極是首選。
SENIAM關于電極形狀的建議
SENIAM針對傳感器的建議僅限于雙極傳感器。“電極形狀”定義為SEMG電極的導電區域的形狀。
SENIAM尚未找到明確,客觀的電極形狀推薦標準。SEMG用戶應清楚說明所用電極的類型,制造和形狀。
2 電極尺寸(ElectrodeSize)
“電極尺寸”定義為SEMG電極的導電區域的尺寸。根據文獻,在(臨床)實踐中使用的SEMG電極的尺寸從1mm2到幾cm2不等。SEMG電極的尺寸會影響所記錄的SEMG。
隨著垂直于肌纖維(垂直于肌纖維的條形電極)的尺寸增加,可以預期電極的視野增加。目前尚無有關此影響SEMG特性擴展的定量數據。
可以看出,隨著肌纖維方向尺寸的增加,這對SEMG信號具有積分作用,從而增加了檢測到的振幅并降低了高頻成分。
歐洲inventory表明,最優選電極是直徑為10 mm的圓形電極。通常,對于雙極型傳感器,電極的尺寸應足夠大,以能夠記錄合理的運動單元池,但又要足夠小,以避免與其他肌肉產生串擾。
SENIAM關于電極尺寸的建議
SENIAM針對傳感器的建議僅限于雙極傳感器。“電極尺寸”定義為SEMG電極導電區域表面的尺寸。
SENIAM建議在肌肉纖維方向上的電極尺寸最大10毫米。
3 電極間距(Interelectrode distance)
“電極間距”定義為2個雙極電極的導電區域之間的中心到中心的距離。
SENIAM關于電極間距離的建議
SENIAM針對傳感器的建議僅限于雙極傳感器。“電極間距離”定義為2個雙極電極的導電區域之間的中心到中心的距離。
SENIAM建議在建議的傳感器位置周圍使用雙極SEMG電極,電極之間的距離為20 mm。當雙極電極施加在相對較小的肌肉上時,電極間距離不應超過肌肉纖維長度的1/4。以這種方式,可以避免由于肌腱和運動終板的影響而導致的不穩定記錄。
4 電極材料(Electrodematerial)
與皮膚形成接觸層的電極材料需要實現良好的電極皮膚接觸,低的電極皮膚阻抗和及時的“穩定”行為(即關于皮膚界面處的阻抗和化學反應)。研究顯示常用不同類型的材料包括:Ag / AgCl,AgCl,Ag,Au等,其中最常用的是Ag / AgCl電極。這些提供了一個穩定的過渡,并且具有相對較低的噪聲,并且在大多數市場上都可以買到。
電極大多與電極凝膠結合。兩種預膠凝為非膠凝的電極都是可商購的。電極凝膠可用于降低電極皮膚的阻抗。實際上,預膠凝電極和非膠凝電極的性能是可比的。非膠凝電極的使用(必須先膠凝后再施加在肌肉上)非常麻煩且耗時。如果操作不正確,則很可能會破壞SEMG記錄。
SENIAM電極材料建議
SENIAM針對傳感器的建議僅限于雙極傳感器。
SENIAM建議使用預膠凝的Ag/AgCl電極。
5 傳感器構造(Sensorconstruction)
“傳感器結構”定義為:(機械)結構,用于集成電極,電纜和(如果適用)前置放大器。預期構造(及其質量)不會直接影響SEMG特性。但是,仍有一些潛在的間接影響會干擾或污染已記錄的SEMG模式:
-如果傳感器的結構使得IED可以在肌肉收縮期間發生變化,則這將調制動作電位的幅度,形狀和寬度,因此將在其幅度和頻率特性方面影響肌電信號。
-如果傳感器的結構可以使電極和電纜移動,則存在運動偽影的潛在風險(由于電纜的拉扯或結構的慣性)。
SENIAM關于傳感器構造的建議
SENIAM針對傳感器的建議僅限于雙極傳感器。“傳感器結構”定義為:(機械)結構,用于集成電極,電纜和(如果適用)前置放大器。
SENIAM建議使用重量輕的材料制成固定電極間距離的結構。需要使用(雙面)膠帶或松緊帶固定電纜,以免拉扯產生偽影。
如果在快速動態收縮中傳感器構造(由于構造的慣性)導致過多(運動)偽像,SENIAM建議使用(雙面)膠帶或環固定電極間距離。
放置傳感器(Sensor placement)
電極安放位置的選擇是表?肌電測試的第1步,也是決定測試信號是否可靠的重要環節,因此必須?度重視。
?先,必須結合運動項?特征選取發揮主要作?的肌?。同時,需要了解所測肌?的主要功能和解剖學標記點,這些點對電極安放很有幫助。
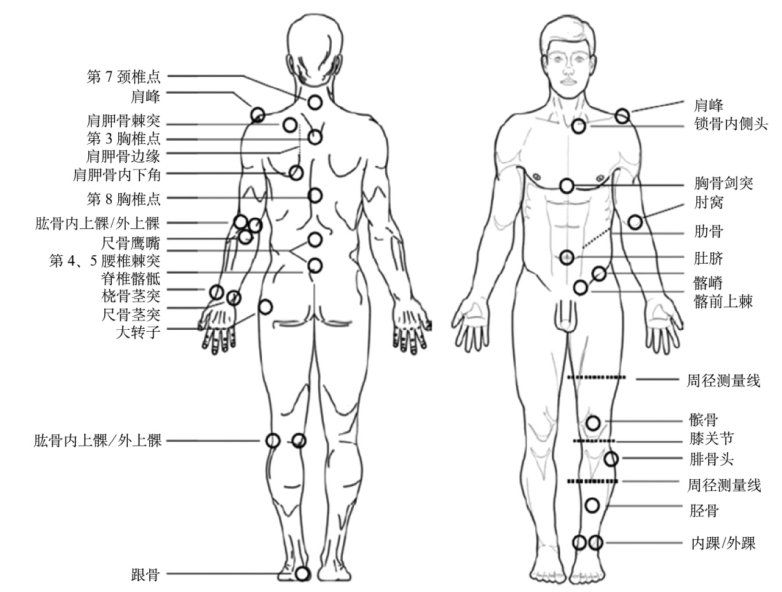
人體主要解刨學標記點
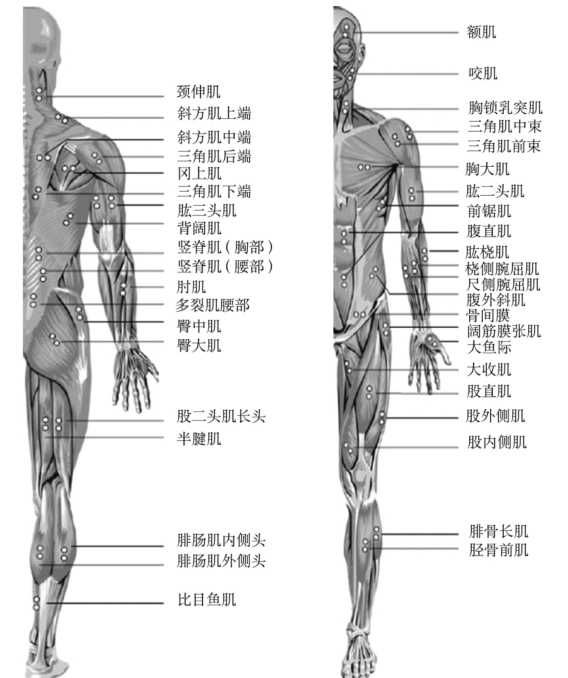
淺表肌?群的名稱及電極安放位置示意圖
1 選擇SEMG傳感器
傳感器定義為電極,電極結構和集成前置放大器(如果適用)的集合。選擇SEMG傳感器時,必須選擇傳感器的類型,形狀,大小,電極間距,材料和結構。傳感器類型可以是單極,雙極或(一維或二維)陣列。形狀可以是圓形,橢圓形,正方形,矩形或針形。尺寸可以從1mm2的表面到幾厘米的直徑不等,電極間距離從1mm到幾厘米不等。可以使用不同類型的電極材料:Ag,AgCl,Ag/AgCl,Au等。
SENIAM有關選擇SEMG傳感器的建議
“傳感器”定義為電極,電極結構和集成前置放大器(如果適用)的集合。針對SEMG傳感器的SENIAM建議僅限于雙極性傳感器:由2個表面電極組成的傳感器。對于雙極傳感器,SENIAM已針對以下方面提出了建議:
-電極形狀
-電極尺寸
-電極間距離
-電極材料
-傳感器構造
2 皮膚準備(Preparationof the skin)
在選擇傳感器之后,需要準備患者的皮膚,以便獲得良好的電極-皮膚接觸。良好的電極-皮膚接觸對于獲得更好的SEMG記錄(就振幅特性而言),越來越少的偽像(電干擾),降低電極之間失衡的風險(降低共模干擾信號)和降低噪音(降低S / N比值)非常重要。正確的皮膚準備對于改善電極與皮膚的接觸非常有用。在文獻中進行了報道的使用了不同的(多種)皮膚準備技術包括:剃毛,用酒精清潔,用凝膠打磨和用砂紙擦拭。
SENIAM建議準備皮膚
SENIAM準備皮膚的建議如果必須放置電極的皮膚表面被毛發覆蓋,則應剃光患者的毛發。
下一步是用酒精清潔皮膚,并使酒精揮發,以便在放置電極之前將皮膚干燥。
3 將患者置于起始姿勢(Positioningthe patient in starting posture)
在準備皮膚后,必須將受試者置于開始姿勢,該姿勢可以確定電極在肌肉上的正確位置。在初始姿勢下,可以清晰地(通過觸診)確定有助于確定正確電極位置的肌肉和解剖標志。
SENIAM建議以起始姿勢定位患者
起始姿勢取決于放置電極的肌肉。針對單個肌肉上傳感器位置的SENIAM建議包含針對每個單個肌肉的起始姿勢的描述。通常,開始姿勢的描述包含對患者姿勢(坐著,躺著,俯臥等)的描述,以及放置電極的身體部分的位置和方向。
有關表面肌群開始姿勢的建議在稍后的文章中體現。
4 確定傳感器位置(Determinationof sensor location)
在將受試者放置在建議的開始姿勢之后,可以確定并標記SEMG傳感器的位置。“傳感器位置”定義為兩個雙極電極在肌肉上的中心位置。傳感器應放置在可以獲得良好且穩定的SEMG的位置。影響良好且穩定的SEMG記錄的因素有:運動點和/或肌腱的存在,以及SEMG傳感器附近其他活動的肌肉(串擾)。
SENIAM有關確定傳感器位置的建議
“傳感器位置”定義為兩個雙極電極在肌肉上的中心位置。SENIAM已針對30個單獨肌肉上的傳感器位置提出了建議。在這些建議中,電極的位置被描述為2個解剖界標之間的線上的點。首先,必須根據SENIAM對傳感器位置的建議來定位解剖標志的位置。接下來,需要在2個地標之間繪制一條線。根據SENIAM對單個肌肉的建議,傳感器的位置可以位于該直線上的某個位置。這些個別建議基于2條一般建議:
-關于傳感器在肌肉上的縱向位置,SENIAM建議將傳感器放置在(最)遠端運動終板區域和遠端肌腱的中間。
-關于傳感器在肌肉上的橫向位置,SENIAM建議將傳感器放置在遠離“邊緣”的其他細分區域或肌肉的表面,以使肌肉與這些細分區域和其他肌肉的間距最大。
有關單個肌肉的傳感器位置的建議包含在后續文章中。
5 傳感器的放置和固定(Placementand fixation of the sensor)
確定并標記傳感器位置后,需要將電極放置并固定在標記的位置周圍。在放置和固定電極時,必須選擇電極間的距離,方向,固定方法和參考電極的位置。“電極間距離”定義為2個雙極電極的導電區域之間的中心到中心的距離。文獻表明電極間距對拾取面積和串擾產生影響。“方向”被定義為兩個雙極電極之間的線相對于肌纖維方向的位置。從文獻中知道,電極的方向對所記錄的SEMG具有重要影響。參比電極需要放置在大共模干擾信號風險最小的位置。通常接受的是,參考電極需要放置在無電的組織上。在文獻中,根據記錄SEMG的肌肉,最好使用多個參考電極位置。
SENIAM有關傳感器放置和固定的建議
SENIAM關于電極放置和固定的建議包括以下方面:
電極間距離
“電極間距離”定義為2個雙極電極的導電區域之間的中心到中心的距離。
SENIAM建議在推薦的傳感器位置周圍使用雙極SEMG電極,電極之間的距離為20 mm。當雙極電極施加在相對較小的肌肉上時,電極間距離不應超過肌纖維長度的1/4。以這種方式,可以避免由于肌腱和運動終板的影響而導致的不穩定記錄。
電極方向
“電極定向”定義為兩個雙極電極之間的線相對于肌纖維方向的位置。
SENIAM建議將雙極SEMG電極放置在推薦的傳感器位置周圍,并使其方向平行于肌纖維。
固定在皮膚上
SENIAM建議使用松緊帶或(雙面)膠帶/環將電極(結構)和電纜固定在皮膚上,使電極正確固定在皮膚上,不妨礙移動,并且電纜不拉動電極(結構)。
參比電極的位置
根據不同的應用,SENIAM建議使用手腕,C7的棘突或腳踝作為參考電極的標準位置。
針對單個肌肉的傳感器位置的建議包括針對每個單個肌肉的電極間距離,雙極SEMG電極的方向以及參考電極的位置的建議。這些建議可以在本公眾號后續的文章中找到。
6 連接測試(Testingof the connection)
放置并固定電極后,可以將電極(包括參比電極)連接到SEMG設備,并可以進行臨床測試以測試電極是否已正確放置在肌肉上并已連接到設備,從而使電極可以記錄可靠的SEMG信號。臨床測試保證(在正常情況下)被測肌肉的活動。
SENIAM有關連接測試的建議
SENIAM建議對每條肌肉進行臨床測試。所描述的臨床測試是公認的肌肉測試,可以保證(在正常情況下)被測肌肉的活動。臨床測試必須從SENIAM建議中描述的傳感器位置的起始姿勢開始,并且必須根據建議進行。所描述的臨床測試不是“選擇性”收縮,其中只有所需的肌肉處于活動狀態,而所有其他肌肉均處于非活動狀態。
7 有關單個肌肉上傳感器位置的建議(Sensor Locations)
SENIAM已針對30個單獨肌肉上的傳感器位置提出了建議。
對于每一塊肌肉,建議包括肌肉解剖的描述(細分、起始點、功能)、表面肌電傳感器建議的描述、電極位置和方向的描述以及記錄該特定肌肉表面肌電的起始姿勢和臨床試驗的描述。SENIAM針對個別肌肉傳感器位置的建議包括以下身體部位:
-肩和頸
(1)斜方肌上部
|
肌群 |
|
|
名稱 |
斜方肌 |
|
細分 |
斜方肌下行(上部) |
|
肌肉解剖學 |
|
| 起點 |
枕外隆起,頸項上線內側1/3,頸項韌帶,第7頸椎棘突。 |
|
止點 |
鎖骨外側1/3和肩胛骨肩峰 |
|
功能 |
起點固定:穩定肩胛骨內收(與下部肌纖維一起)(主要由橫纖維進行)。 肩胛骨的旋轉使肩胛盂腔面向頭顱(與下行纖維一起進行,由橫向纖維穩定)。 此外,下行肌纖維抬高肩胛骨。當止點固定并單向作用時,下行纖維伸展、橫向彎曲并旋轉頸椎的頭部和關節,使面部朝相反的方向旋轉。隨著止點固定和作用的雙邊下行斜方肌伸展頭部和頸部。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐直,雙臂垂直懸垂。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
| -位置 |
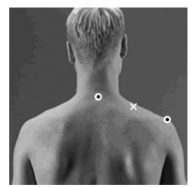
電極需要放置在椎骨C7上從肩峰到脊柱的線上的50%處。 |
| -方向 |
在脊椎C7上的肩峰和脊椎之間的直線方向上。 |
| -皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍。 |
| 臨床測試 |
抬高鎖骨和肩胛骨的肩峰端;頭部和頸部向抬高的肩部伸展和旋轉,面部朝相反方向旋轉。在肩部向肩部施加壓力,并在向前彎曲的方向上抵住頭部。 |
|
定位 |
|
(2)斜方肌中部
|
肌群 |
|
|
名稱 |
斜方肌 |
|
細分 |
斜方肌中部 |
|
肌肉解剖學 |
|
| 起點 |
第一至第五胸椎的棘突。 |
|
止點 |
肩胛骨脊柱的上唇。 |
|
功能 |
起點固定:橫向纖維主要進行肩胛骨內收(通過下行和上行纖維穩定)。 肩胛骨旋轉的穩定性,使肩胛骨腔面向顱骨。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐直,雙臂垂直懸垂。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
| -位置 |
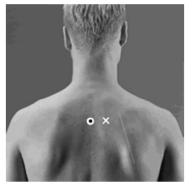
電極需要放置在肩胛骨和脊柱中間邊緣之間的50%,在T3水平位置。 |
| -方向 |
在T5和肩峰之間的直線方向。 |
| -皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍。 |
| 臨床測試 |
肘部伸肌和肩后肌必須給予必要的固定,以使用手臂作為杠桿。肩胛骨從旋轉位置內收,在這個位置下角是側向旋轉的。為了獲得肩胛骨的這個位置并獲得測試的杠桿作用,肘關節需要伸展,肩關節需要呈90度外展和側向旋轉。肩部的旋轉由手掌朝著頭骨的手的位置表示(不抬高肩帶)。 |
|
定位 |
|
(3)斜方肌下部
|
肌群 |
|
|
名稱 |
斜方肌 |
|
細分 |
斜方肌下部 |
|
肌肉解剖學 |
|
| 起點 |
第六至第十二胸椎的棘突。 |
|
止點 |
肩胛骨的頂點。 |
|
功能 |
起點固定:穩定肩胛骨內收(與下行纖維一起)(主要由橫纖維進行)。 肩胛骨的旋轉使肩胛盂腔面向頭顱(與下行纖維一起進行,由橫向纖維穩定)。 此外,上行的肌纖維壓迫肩胛骨。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐直,雙臂垂直懸垂。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
| -位置 |
電極需要放置在從肩胛岡到第8胸椎的直線上的2/3處。 |
| -方向 |
在T8和肩峰之間的直線方向。 |
| -皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍。 |
| 臨床測試 |
注意肘部伸肌和肩部肌肉給予必要的固定,以便在本試驗中使用手臂作為杠桿。肩胛骨凹陷,下角側向旋轉,肩胛骨內收。為了獲得肩胛骨的這個位置,以強調上行纖維的作用,并獲得測試的杠桿作用,手臂斜放在頭頂上,肩部側向旋轉。向下按壓前臂。 |
|
定位 |
|

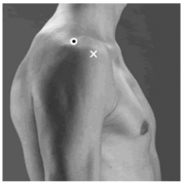
(4)三角肌前部
|
肌群 |
|
|
名稱 |
三角肌 |
|
細分 |
前部 |
|
肌肉解剖學 |
|
| 起點 |
前緣,上表面,鎖骨外側1/3。 |
|
止點 |
肱骨三角肌粗隆。 |
|
功能 |
肩關節外展,主要由中部纖維完成,由前后纖維穩定。此外,前纖維彎曲并內側旋轉肩關節。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
雙臂垂直懸垂,手掌向內。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
| -位置 |
電極需要放置在肩峰遠端和前方的一個手指寬度處。
|
| -方向 |
在肩峰和拇指之間的直線方向。 |
| -皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍。 |
| 臨床測試 |
肩外展輕微屈曲,肱骨輕微旋轉。在直立坐姿時,有必要將肱骨稍微側向旋轉,以增加重力對前纖維的影響。三角肌前部的解剖活動需要輕微的內側旋轉,同時向手臂的前內側面施加壓力,使其朝內收和輕微伸展的方向運動。 |
|
定位 |
|
(5)三角肌中部
|
肌群 |
|
|
名稱 |
三角肌 |
|
細分 |
中部 |
|
肌肉解剖學 |
|
| 起點 |
肩峰的側緣和上表面。 |
|
止點 |
肱骨三角肌粗隆。 |
|
功能 |
三角肌中部可進行肩關節外展,并通過前、后纖維穩定。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
以軀干相對于手臂的位置坐著,這樣穩定的軀干就不需要進一步的穩定。如果肩胛骨固定肌肉薄弱,肩胛骨必須穩定。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
| -位置 |
電極需要從肩峰到肘關節外側上髁放置。這應該與肌肉最大的隆起相對應。
|
| -方向 |
在肩峰和手之間的直線方向。 |
| -皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍。 |
| 臨床測試 |
手臂應外展,不得旋轉。將肩膀置于測試位置時,應彎曲肘部以指示旋轉的中立位置,但可以在確定肩膀位置后將其伸展,以便將伸展的四肢用于更長的杠桿。如果肘部彎曲,則需要向肱骨遠端的背面施加壓力,如果肘部伸展,則需要對前臂施加壓力。 |
|
定位 |
|

(6)三角肌后部
|
肌群 |
|
|
名稱 |
三角肌 |
|
細分 |
后部 |
|
肌肉解剖學 |
|
| 起點 |
肩胛骨脊柱后緣下唇。 |
|
止點 |
肱骨三角肌粗隆。 |
|
功能 |
肩關節外展,主要由中間纖維完成,由前后纖維穩定。此外,后纖維伸展并側向旋轉。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐直,雙臂垂直懸掛,手掌向內指向。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
| -位置 |
將電極放在肩峰角后大約兩指的區域中心。
|
| -方向 |
在肩峰和小指之間的直線方向。 |
| -皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍。 |
| 臨床測試 |
稍微伸展肩膀,肱骨輕微內旋。肱骨處于輕微的內側旋轉,以使后纖維處于反重力位置。解剖動作需要輕微的側向旋轉,同時向內臂的后外側表面沿內收和輕微彎曲的方向施加壓力。 |
|
定位 |
|

-軀干或(下部)后背
(1)豎脊肌最長肌
|
肌群 |
|
|
名稱 |
豎脊肌 |
| 細分 | 最長肌 |
|
肌肉解剖學 |
|
|
起點 |
腰段與髂腰段、腰椎橫突和副突后表面、胸腰椎筋膜前層融為一體。 |
| 止點 |
通過肌腱進入所有胸椎橫突的尖端,通過肉質的指狀突起在結節和角之間的9或10根肋骨下方。 |
| 功能 |
軀干伸 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥位,腰椎輕微彎曲。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在距L1棘突2指寬的外側。 |
|
-方向 |
垂直 |
|
-皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上。 |
|
臨床測試 |
從俯臥位置抬起軀干。 |
|
定位 |
|

(2)豎脊肌髂肋肌
|
肌群 |
|
|
名稱 |
豎脊肌 |
| 細分 |
髂肋肌 |
|
肌肉解剖學 |
|
|
起點 |
附著于骶骨內側嵴的闊肌腱前表面、腰椎棘突和第11、12胸椎棘突、髂嵴內側唇后部、棘上韌帶和骶骨外側嵴。 |
| 止點 |
通過肌腱進入下6或7肋角的下緣。 |
| 功能 |
伸展,側向約束(單側活動) |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥位,腰椎輕微彎曲。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在從髂后棘到下肋骨最低點的直線中間1指寬的L2水平。 |
|
-方向 |
在髂后棘上肋和下肋最低點之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上。 |
|
臨床測試 |
從俯臥位置抬起軀干。 |
|
定位 |
|
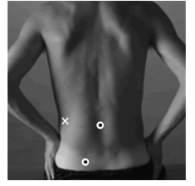
(3)多裂肌
|
肌群 |
|
|
名稱 |
多裂肌 |
| 細分 |
|
|
肌肉解剖學 |
|
|
起點 |
L1-L5棘突。
|
| 止點 |
L4-S1乳突 髂骨,骶骨背表面。 |
| 功能 |
軀干伸 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥位,腰椎輕微彎曲。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在髂后棘尾尖到L5棘突水平L1和L2間隙上方(即距中線約2-3cm)的線上并與之對齊。 |
|
-方向 |
在上述線路的方向。 |
|
-皮膚固定 |
(雙面)膠帶/環。 |
|
-參比電極 |
在C7的棘突上。 |
|
臨床測試 |
從俯臥位置抬起軀干。 |
|
定位 |
|

-上肢
(1)肱二頭肌
| 肌群 | |
|
名稱 |
肱二頭肌 |
|
細分 |
短頭和長頭 |
|
肌肉解剖學 |
|
|
起點 |
短頭:肩胛骨喙突的前端。 長頭:肩胛骨盂上結節。 |
|
止點 |
橈骨肱二頭肌腱膜粗隆(肱二頭肌腱膜)。 |
|
功能 |
肘關節屈曲。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐在椅子上,肘部彎曲成直角,前臂背側水平向下。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在肩峰內側和肘窩之間的直線上,距離肘窩1/3。 |
|
-方向 |
在肩峰和肘窩之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
手腕上/手腕周圍。 |
|
臨床測試 |
將一只手放在肘部下方,以緩沖桌上的壓力,并將肘部稍微向下彎曲或以直角彎曲,前臂處于旋后狀態。沿伸展方向按壓前臂。 |
|
定位 |
|

(2) 肱三頭肌長頭
| 肌群 | |
|
名稱 |
肱三頭肌 |
|
細分 |
長頭 |
|
肌肉解剖學 |
|
|
起點 |
肩胛盂下結節。 |
|
止點 |
尺骨鷹嘴突后表面和前臂筋膜。 |
|
功能 |
肘關節伸展。長頭也會內收,可能有助于肩關節的伸展。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐位,在肩上約90度外展與手臂90度彎曲,手掌向下。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在肩峰后嵴和鷹嘴之間的50%線上,在該線中間2指寬處。 |
|
-方向 |
在肩峰后嵴和鷹嘴之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
手腕上/手腕周圍。 |
|
臨床測試 |
在屈撓方向向前臂施加壓力時,伸展肘關節。 |
|
定位 |
|

(3)肱三頭肌外側頭
| 肌群 | |
|
名稱 |
肱三頭肌 |
|
細分 |
外側頭 |
|
肌肉解剖學 |
|
|
起點 |
肱骨近端和外側肌間隔的1/2側和后表面。 |
|
止點 |
尺骨鷹嘴突后表面和前臂筋膜。 |
|
功能 |
肘關節伸展。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐位,在肩上約90度外展,手臂彎曲90度,手掌向下。 |
|
電極尺寸 |
肌纖維方向的最大尺寸:10毫米。 |
|
電極距離 |
20mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在肩峰后嵴和鷹嘴之間的線的50%,在線的外側2指寬處。 |
|
-方向 |
在肩峰后嵴和鷹嘴突之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
手腕上/手腕周圍。 |
|
臨床測試 |
在屈撓方向向前臂施加壓力時,伸展肘關節。 |
|
定位 |
|

(4)拇短展肌
| 肌群 | |
|
名稱 |
拇短展肌 |
|
細分 |
|
|
肌肉解剖學 |
|
|
起點 |
屈肌支持帶、斜方骨結節、舟骨結節。 |
|
止點 |
橈側拇指和伸肌伸展近端指骨的根部。 |
|
功能 |
在垂直于手掌平面的腹側方向外展拇指的腕掌關節和掌指關節。通過其附著于伸肌背側的伸展,可延伸拇指指間關節。有助于對抗,并有助于掌指關節的屈曲。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐著或仰臥,手背穩定在桌子上。 |
|
電極尺寸 |
等長收縮:肌纖維方向最大尺寸:5毫米。 動態收縮:肌肉纖維方向的最大尺寸:2毫米。 |
|
電極距離 |
等長收縮:7.5毫米。 動態收縮:5毫米。 |
|
電極放置 |
|
|
-位置 |
第1掌骨遠端1/4的稍內側。 |
|
-方向 |
與第一掌骨平行。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
手腕上/手腕周圍。 |
|
臨床測試 |
將拇指從手掌向右拐,同時向手掌方向施加近側指骨的壓力。 |
|
定位 |
|

-臀部和大腿
(1)臀肌
| 肌群 | |
|
名稱 |
臀肌 |
| 細分 |
臀大肌 |
|
肌肉解剖學 |
|
|
起點 |
髂骨翼外面,骶、尾骨背面及骶結節韌帶。 |
|
止點 |
股骨臀肌粗隆和髂脛束。 |
|
功能 |
近固定使大腿在髖關節處伸和旋外;肌肉的上半部收縮可使大腿外展、下半部收縮可使大腿內收。 遠固定一側收縮,使骨盆轉向對側。兩側同時收縮使骨盆后傾。并使軀干后伸,維持身體站立的平衡。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥,爬在桌子上。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在骶骨和大轉子之間50%的線上。這個位置對應于臀部中間最突出的位置,遠高于大轉子可見的凸起。 |
| -方向 | 從髂后上棘到大腿后側中間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍或腳踝上/周圍。 |
|
臨床測試 |
克服手動阻力抬起整條腿。 |
| 定位 |
|
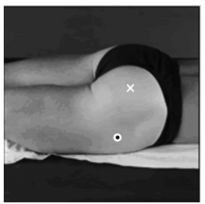
(2)臀中肌
| 肌群 | |
|
名稱 |
臀肌 |
| 細分 |
臀中肌 |
|
肌肉解剖學 |
|
|
起點 |
髂骨翼外面。 |
|
止點 |
股骨大轉子。 |
|
功能 |
近固定時,使髖關節外展;前部使髖關節屈和內旋。后部使髖關節伸和外旋。遠固定時,一側收縮使骨盆向同側傾;兩側前部肌纖維收縮,使骨盆前傾,后部肌纖維收縮使骨盆后傾。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
側臥在桌子上。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在髂嵴到大轉子連線的50%處。 |
| -方向 |
從髂嵴到大轉子的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
在C7的棘突上或手腕上/周圍或腳踝上/周圍。 |
|
臨床測試 |
側臥,雙腿伸開,對抗手動阻力。 |
| 定位 |
|
(3)闊筋膜張肌
| 肌群 | |
|
名稱 |
臀肌 |
| 細分 |
闊筋膜張肌 |
|
肌肉解剖學 |
|
|
起點 |
髂前上棘。 |
|
止點 |
脛骨外側髁。 |
|
功能 |
髖關節內收、內旋和屈曲,緊張大腿外側的髂脛束,有助于膝關節伸展。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
側臥在桌子上。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
從髂前棘線到股骨外側髁上近端1/6。 |
| -方向 |
從髂前棘到股骨外側髁的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
手腕上/周圍。 |
|
臨床測試 |
抬起并外展腿部,以抵抗手動阻力。 |
| 定位 |
|

(4)股直肌
| 肌群 | |
|
名稱 |
股四頭肌 |
| 細分 |
股直肌 |
|
肌肉解剖學 |
|
|
起點 |
髂前下棘和髖臼上緣。 |
|
止點 |
脛骨上端前面的脛骨粗隆。 |
|
功能 |
膝關節伸和髖關節屈。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐在桌子上,膝蓋輕微彎曲,上身稍微向后彎曲。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在髂前棘到髕骨上半部連線的50%。 |
| -方向 |
從髂前棘到髕骨上部的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
伸膝而不旋轉大腿,同時向小腿施加阻力。 |
| 定位 |
|

(5)股內側肌
| 肌群 | |
|
名稱 |
股四頭肌 |
| 細分 |
股內側肌 |
|
肌肉解剖學 |
|
|
起點 |
股骨粗隆間線的遠端半部分、副翼的內側唇、內側髁上線的近端、內收肌和內收肌的肌腱和內側肌間隔。 |
|
止點 |
髕骨的近端和髕骨韌帶。 |
|
功能 |
膝關節伸。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐在桌子上,膝蓋輕微彎曲,上身稍微向后彎曲。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在髂前上棘與內側韌帶前緣關節間隙之間80%的位置。 |
| -方向 |
幾乎垂直于髂前上棘與內側韌帶前緣關節間隙之間的線。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
伸膝而不旋轉大腿,同時向小腿施加阻力。 |
| 定位 |
|

(6)股外側肌
| 肌群 | |
|
名稱 |
股四頭肌 |
| 細分 |
股外側肌 |
|
肌肉解剖學 |
|
|
起點 |
股骨粗隆間近端、大轉子前下緣、臀粗隆外側唇、坐骨近側唇半側、外側肌間隔。 |
|
止點 |
髕骨的近端和髕骨韌帶。 |
|
功能 |
膝關節伸。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
坐在桌子上,膝蓋輕微彎曲,上身稍微向后彎曲。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在從髂前棘到髕骨外側的2/3線上。 |
| -方向 |
在肌纖維的方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
伸膝而不旋轉大腿,同時向小腿施加阻力。 |
| 定位 |
|
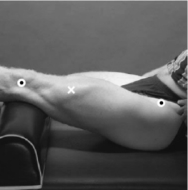
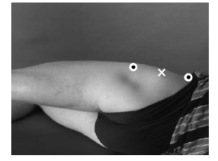
(7)股二頭肌
| 肌群 | |
|
名稱 |
股二頭肌 |
| 細分 |
長頭和短頭 |
|
肌肉解剖學 |
|
|
起點 |
長頭起自坐骨結節。 短頭起自股骨粗線外側唇下部。 |
|
止點 |
腓骨頭外側,脛骨外側髁,小腿外側深筋膜。 |
|
功能 |
屈膝關節、伸髖關節。屈膝時,可使小腿旋外。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥,面朝下,大腿放在桌子上,膝蓋彎曲(小于90度),大腿輕微側向旋轉,腿相對于大腿輕微側向旋轉。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在坐骨結節和脛骨外側上髁之間50%的位置。 |
| -方向 |
在坐骨結節和脛骨外側上髁之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
在膝關節伸展的方向上按壓靠近踝關節的腿。 |
| 定位 |
|
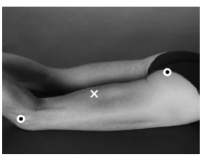
(8)半腱肌
| 肌群 | |
|
名稱 |
半腱肌 |
| 細分 |
|
|
肌肉解剖學 |
|
|
起點 |
坐骨結節。 |
|
止點 |
脛骨上端的內側。 |
|
功能 |
固定時,使大腿在髖關節處伸,小腿在膝關節處屈和內旋。遠固定時,其功能與股二頭肌相同。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥,面朝下,大腿放在桌子上,內側旋轉,腿相對于大腿內側旋轉。膝關節需要彎曲到90度以下。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
| 電極距離 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在坐骨結節和脛骨內上髁之間50%的位置。 |
| -方向 |
在坐骨結節和脛骨內側上髁之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
在膝關節伸展的方向上按壓靠近踝關節的腿。 |
| 定位 |
|

-小腿和腳
(1)脛骨前肌
|
肌群 |
|
|
名稱 |
脛骨前肌 |
|
細分 |
|
|
肌肉解剖學 |
|
|
起點 |
外側髁和脛骨外側近端1/2,軟骨膜,深筋膜和外側肌間隔。 |
|
止點 |
內側楔骨內側面和第1跖骨底。 |
|
功能 |
踝關節背屈并協助足內翻。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
仰臥或坐著。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
|
電極間距 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在腓骨尖和內踝尖之間的1/3線上。 |
|
-方向 |
在腓骨尖和內踝尖之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
在踝關節正上方支撐腿,踝關節背屈,腳倒置,不伸展大腳趾。沿踝關節足底屈曲和足部外翻方向,對足部內側、背表面施加阻力。 |
|
定位 |
|

(2)腓骨長肌
|
肌群 |
|
|
名稱 |
腓骨長肌 |
|
細分 |
|
|
肌肉解剖學 |
|
|
起點 |
腓骨外側面上2/3和脛骨外側髁。 |
|
止點 |
內側契骨和第一跖骨的基底部。 |
|
功能 |
足外翻,有助于踝關節的足底屈曲。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
四肢中立位旋轉坐著。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
|
電極間距 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在腓骨頂端到外踝頂端之間的25%線上。 |
|
-方向 |
腓骨頭端到外踝端之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
將腿支撐在踝關節上方。在足底外側邊緣和足底施加阻力時,足踝部足底彎曲,在足部倒轉和踝關節背屈的方向上施加阻力。 |
|
定位 |
|
(3)腓骨短肌
|
肌群 |
|
|
名稱 |
腓骨短肌 |
|
細分 |
|
|
肌肉解剖學 |
|
|
起點 |
腓骨遠端2/3的外側緣。 |
|
止點 |
第5跖骨外側的結節處。 |
|
功能 |
足外翻,有助于踝關節跖屈。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
四肢中立位旋轉坐著。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
|
電極間距 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放在腓骨長肌肌腱的前面,從外踝頂端到腓骨頭的距離為25%。 |
|
-方向 |
從外踝尖到腓骨頭的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
將腿支撐在踝關節上方。在足底外側邊緣和足底施加阻力時,足踝部足底彎曲,在足部倒轉和踝關節背屈的方向上施加阻力。 |
|
注意 |
由于主要部分被其他肌肉覆蓋,因此很難從表面進入腓骨短腓肌。避免指趾外側肌串擾/重疊。 |
|
定位 |
|
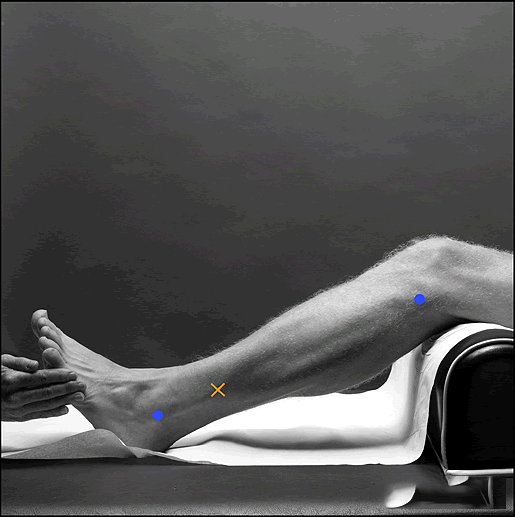
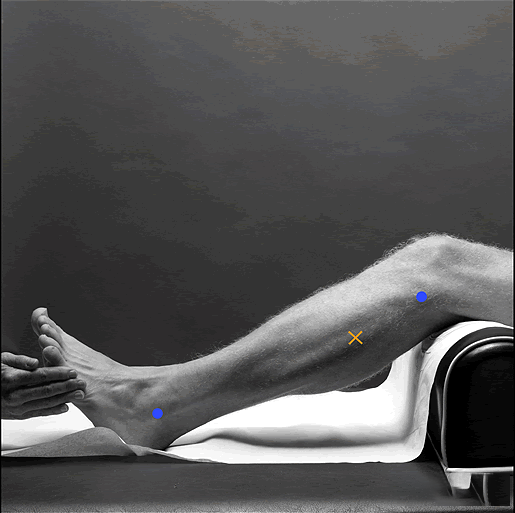
(4)比目魚肌
|
肌群 |
|
|
名稱 |
比目魚肌 |
|
細分 |
|
|
肌肉解剖學 |
|
|
起點 |
腓骨頭和腓骨干上1/3的后面,脛骨比目魚肌線。 |
|
止點 |
經跟腱止于跟骨后面。 |
|
功能 |
踝關節跖屈。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
膝關節彎曲大約90度,將被調查腿的腳后跟/腳放在地板上。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
|
電極間距 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在股骨內側髁到內踝之間的2/3處。 |
|
-方向 |
從內側髁到內踝的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
將手放在膝蓋上,保持/推動膝蓋向下,同時要求受試者/患者將腳后跟抬離地面。 |
|
定位 |
|
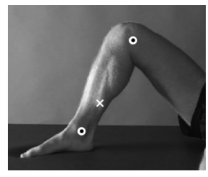
(5)腓腸肌內側頭
|
肌群 |
|
|
名稱 |
腓腸肌 |
|
細分 |
內側頭 |
|
肌肉解剖學 |
|
|
起點 |
股骨內側髁后面。 |
|
止點 |
經跟腱止于跟骨后面。 |
|
功能 |
踝關節屈曲并協助膝關節屈曲。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥,臉朝下,膝蓋伸展,腳伸出桌子的末端。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
|
電極間距 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放在肌肉最突出的隆起處。 |
|
-方向 |
腿的方向(見圖)。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
腳的足底屈曲側重于向上拉動腳跟,而不是將前腳向下推。為了在該位置獲得最大阻力,必須對前腳和跟骨施加壓力。 |
|
定位 |
|

(6)腓腸肌外側頭
|
肌群 |
|
|
名稱 |
腓腸肌 |
|
細分 |
外側頭 |
|
肌肉解剖學 |
|
|
起點 |
股骨內側髁后面。 |
|
止點 |
經跟腱止于跟骨后面。 |
|
功能 |
踝關節屈曲并協助膝關節屈曲。 |
|
建議的傳感器放置步驟 |
|
|
起始姿勢 |
俯臥,臉朝下,膝蓋伸展,腳伸出桌子的末端。 |
|
電極尺寸 |
肌肉纖維方向的最大尺寸:10毫米。 |
|
電極間距 |
20 mm |
|
電極放置 |
|
|
-位置 |
電極需要放置在腓骨頭部和腳跟之間的1/3處。 |
|
-方向 |
在腓骨頭部和腳跟之間的直線方向。 |
|
-皮膚固定 |
(雙面)膠帶/環或松緊帶。 |
|
-參比電極 |
腳踝上/周圍或C7棘突。 |
|
臨床測試 |
腳的足底屈曲側重于向上拉動腳跟,而不是將前腳向下推。為了在該位置獲得最大阻力,必須對前腳和跟骨施加壓力。 |
|
定位 |
|

便攜式無線表面肌電解決方案
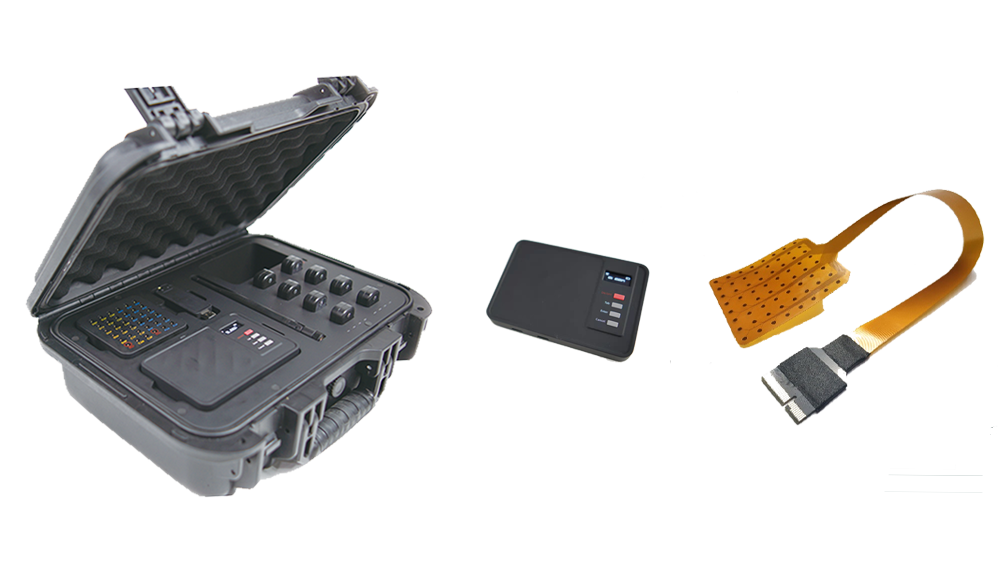
便攜式無線肌電測試系統由 64 通道(最大支持256通道)無線高密度肌電信號采集系統、分布式無線肌電測試系統以及專用分析軟件組成。能進行肌電信號采集,具備在運動條件下測量數據的能力,具有良好的兼容性與擴展性且支持離線采集。該系統可廣泛應用于人機交互、腦機接口、虛擬現實、智能假肢、康復醫療以及運動訓練等領域。
豐富的配件

分布式多通道常規肌電圖,每組4、8、16通道傳感器(最大256通道)
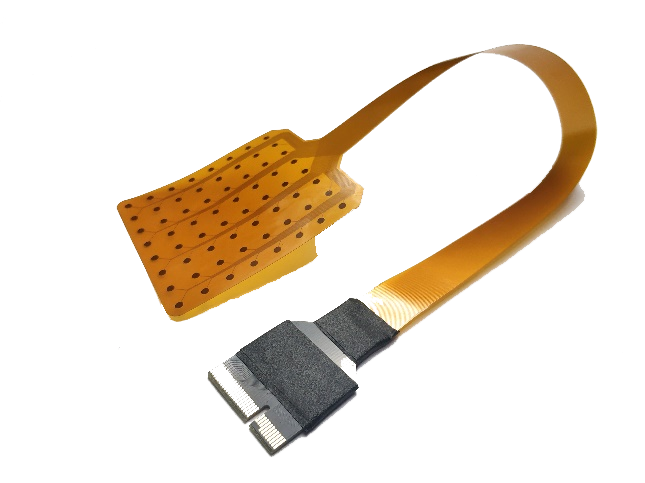
32/64 通道 8 x 8 HD-EMG 網格可以根據客戶需求定制不同的電極間距電極片(8mm / 10mm / ...)傳感器

分散式高密度肌電,每組4、8、16通道傳感器(最大256通道)

可重復使用 4 / 8 / 16 / 32 / 64通道高密度織物肌電傳感器(支持定制)
表面肌電采集分析軟件
主要優勢:
1、多模態數據同步模塊,可實現多種信號實時同步傳輸;
2、可配置設備的采集參數,實現數據同步采集功能,可顯示實時波形、實時頻譜圖、實時電勢圖和3D模型姿態;
3、自定義動作序列播放功能,并用Mark點標記動作事件信息;
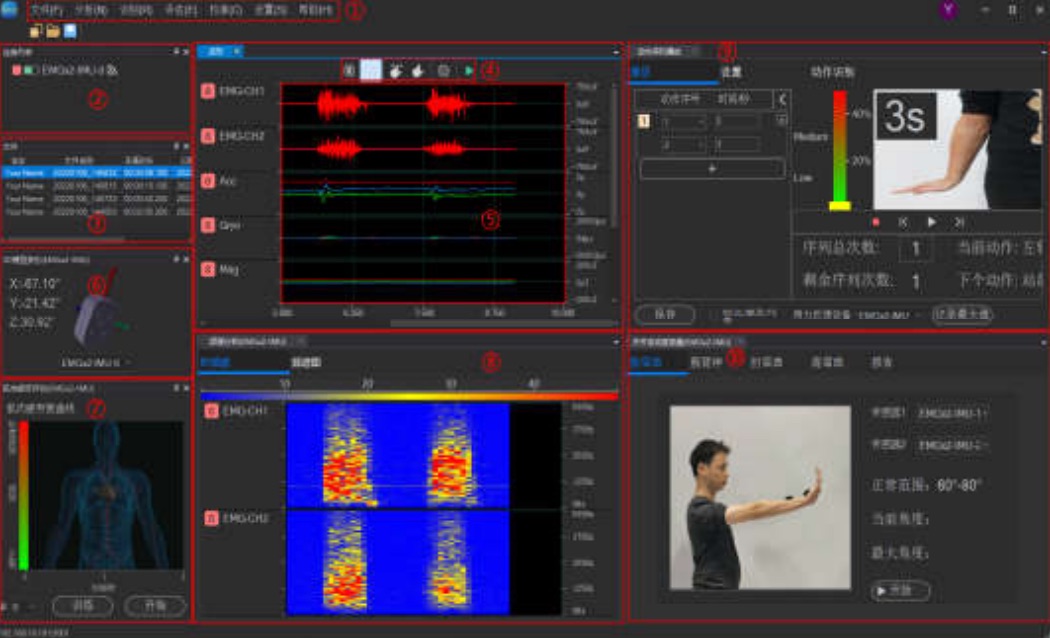
軟件操作界面
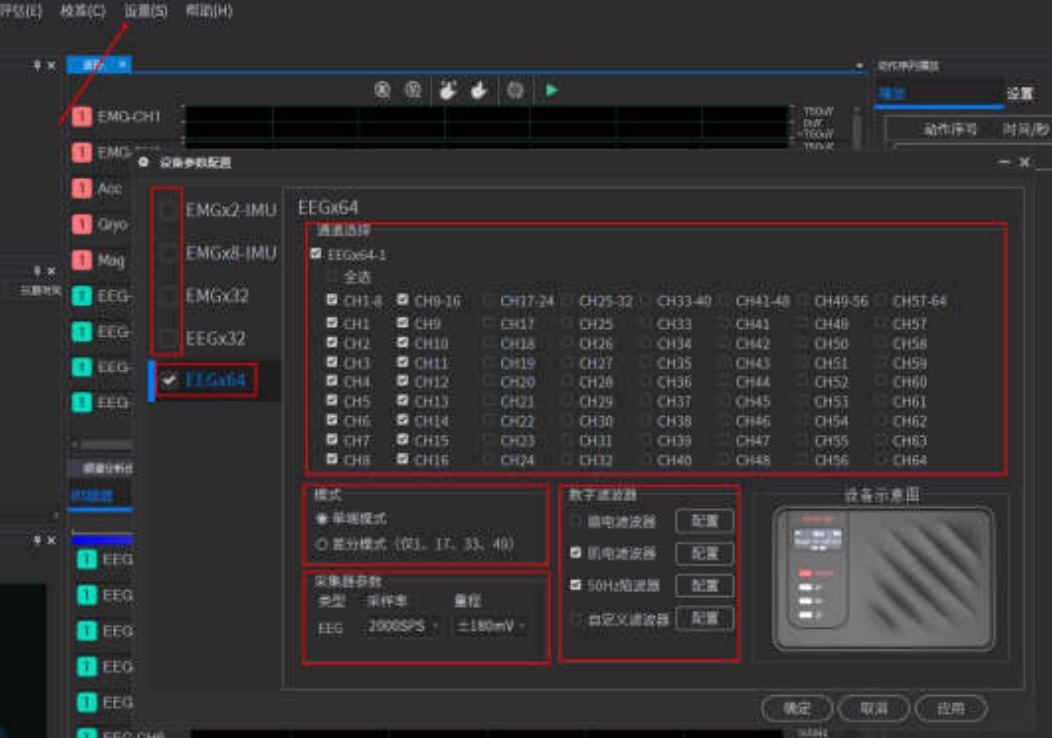
支持肌電、心電、腦電、慣性信號、血氧、血壓的多種信號聯合采集,并配置設備采集參數

實時顯示設備的連接狀態、電量和信號強度
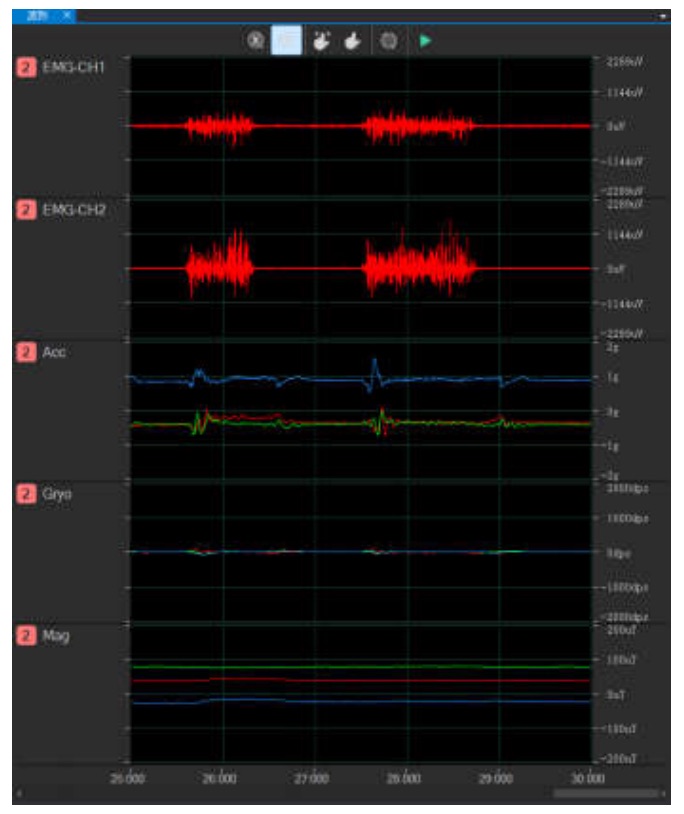
實時顯示波形
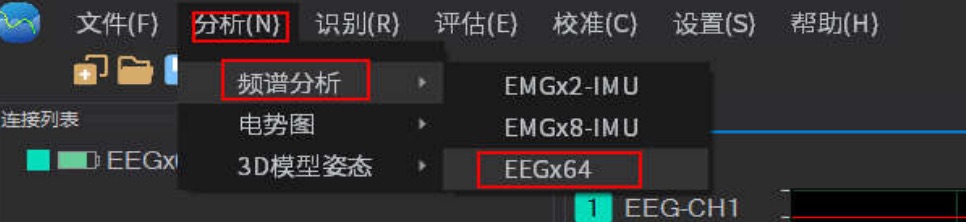
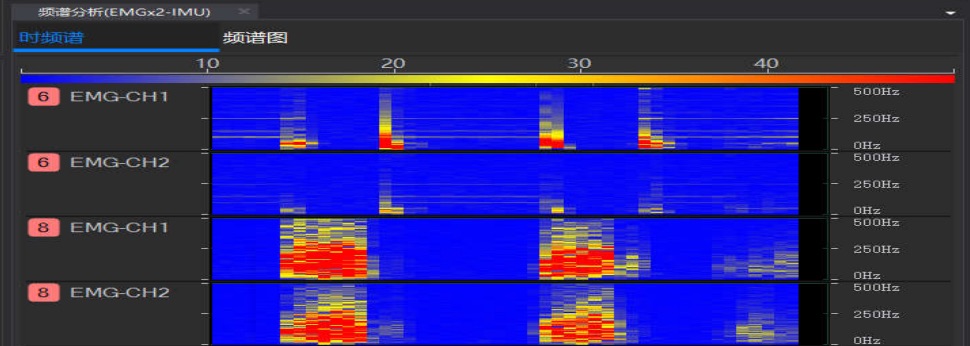
實時頻譜圖、時域頻譜
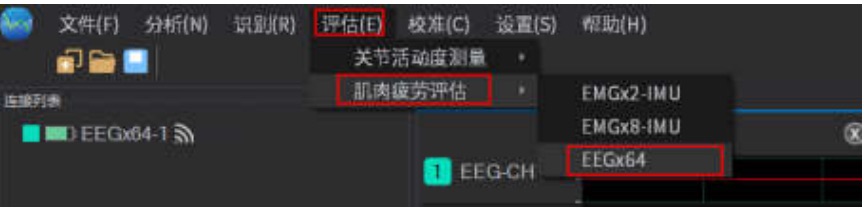
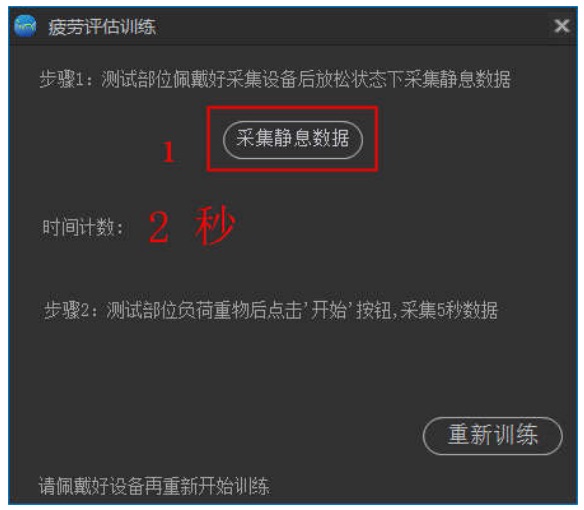

肌肉疲勞分析
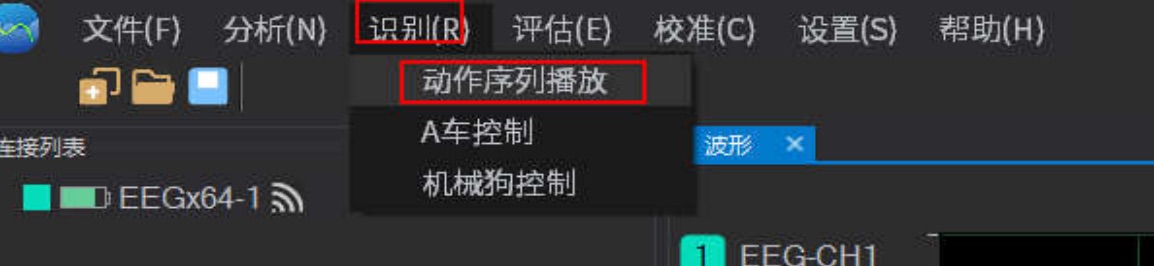

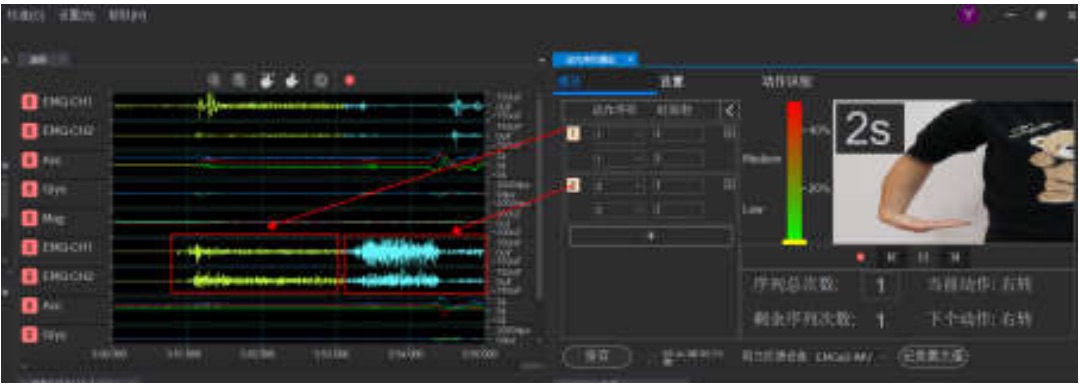
自定義動作序列播放功能,并用Mark點標記動作事件信息,不同動作序列用不同顏色表示
如果您對表面肌電研究感興趣,請與我們聯系!
聲明:文章僅用于學術交流,不用于商業行為,若有侵權及疑問,請后臺留言,管理員即時刪侵!
